25个小时站着怒喷特朗普,议员布克是啥来头?
- 财富人生
- 2025-04-02 17:30:04
- 3
- 更新:2025-04-02 17:30:04
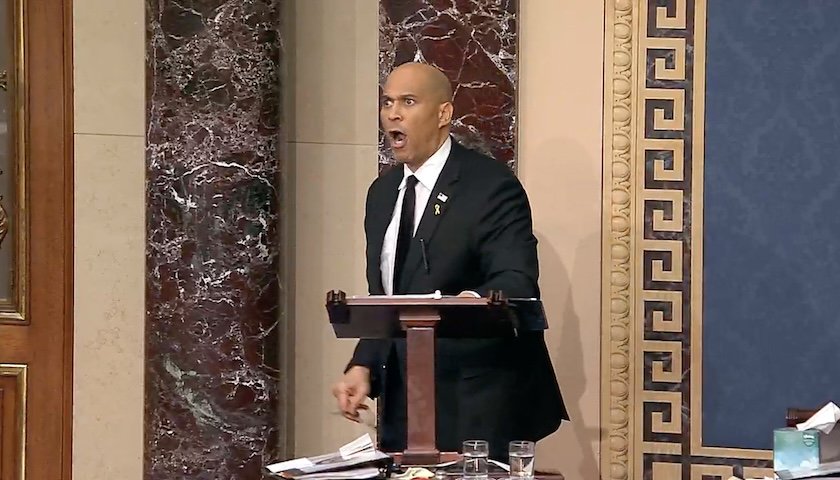
美国民主党籍联邦参议员科里·布克(Cory Booker)以一段25小时5分钟的演讲,批评并警告特朗普政府正在给美国民众带来伤害。同时该演讲也创下了参议院历史上最长演讲纪录。
布克在3月31日晚间7点钟开始演讲,一直到4月1日晚上8时05分结束,总共使用了1160多页打印好的材料。到了第二天下午,已经体力不支的他有时会靠在讲台上。他的TikTok上的直播获得了超过3.5亿个赞。
这段长达25小时5分钟的马拉松式演讲打破了1957年由瑟蒙德(Strom Thurmond)创下24小时18分钟的纪录。当时他试图阻止《民权法案》,但未能成功。
在演讲中大部分时间布克都在批评特朗普的政策,包括马斯克在特朗普领导下改革联邦政府,以及数百万美国人的关键医疗保健计划可能会被削减等。
期间布克还大声朗读普通美国人发送的信件和电子邮件,吟诵诗歌,讨论体育等话题,这也导致参议院当天任何立法议程都被推迟。在得知即将打破纪录时,今年55岁的布克称,“我想先打破一下纪录,然后再处理生物学紧迫问题”。
用长篇演讲来拖延立法是参议院的传统。除非有特殊限制,否则得到会议主持人认可的参议员可以随意发言。布克自始至终都站着,没有去洗手间,以保持发言权。演讲进行到第二天,民主党同僚为了配合他,偶尔会提出长篇问题,以便让他在不丧失发言权的情况下获得短暂的休息时间。
布克后来透露,在演讲前的几天里他就停止进食并进行脱水,导致一度出现肌肉痉挛。
布克是一名典型的民主党少数族裔,在新泽西州北部长大,先后在斯坦福大学、牛津大学、耶鲁大学求学。在校期间曾是一名美式橄榄球运动员,通过体育特长拿到奖学金。他也当选过纽瓦克市长时,还在2020年参加民主党的总统竞选。
随着特朗普各项政策越来越不得民心,自由派选民要求民主党对特朗普采取更强硬立场。
美国全国广播公司新闻频道最近的民意调查发现,民主党人的支持率处于历史低点:只有27%的登记选民表示对该党持积极态度。另外,65%的民主党人希望国会民主党人坚持自己的立场,只有32%的人希望他们与特朗普达成立法妥协。
近年来,美国参议院见证了许多参议员发表的马拉松式演讲,包括2013年泰德·克鲁兹反对平价医疗法案的演讲。当时他的演讲长达21小时,他的经验是穿舒适的鞋子,不喝水。
法国男子卢伊斯·柯莱特(Lluis Colet)以不间断演讲124小时保持着世界纪录。

有话要说...